|
|
|
|
|
|
|
|
|
|
|
某嵌入式刹车控制软件应用于汽车刹车控制器,该软件需求如下:
|
|
|
|
(1)模式选择:采集模式控制离散量信号In_D1并通过模式识别信号灯显示软件当前工作模式。在信号In_D1为低电平时进入正常工作模式(模式识别信号灯为绿色),为高电平时进入维护模式(模式识别信号灯为红色)。软件在正常工作模式下仅进行刹车控制和记录刹车次数,在维护模式下仅进行中央控制器指令响应。
|
|
|
|
(2)刹车控制:采用定时中断机制,以5ms为周期,采集来自驻车器发出的模拟量信号In_A1以及来自刹车踏板发出的模拟量信号In_A2,并向刹车执行组件发送模拟量信号Out_A1进行刹车控制。
|
|
|
|
(3)记录刹车次数:在Out_A1大于4V时,读出非易失存储器NVRAM中保存的刹车次数记录进行加1操作,然后保存至非易失存储器NVRAM中。
|
|
|
|
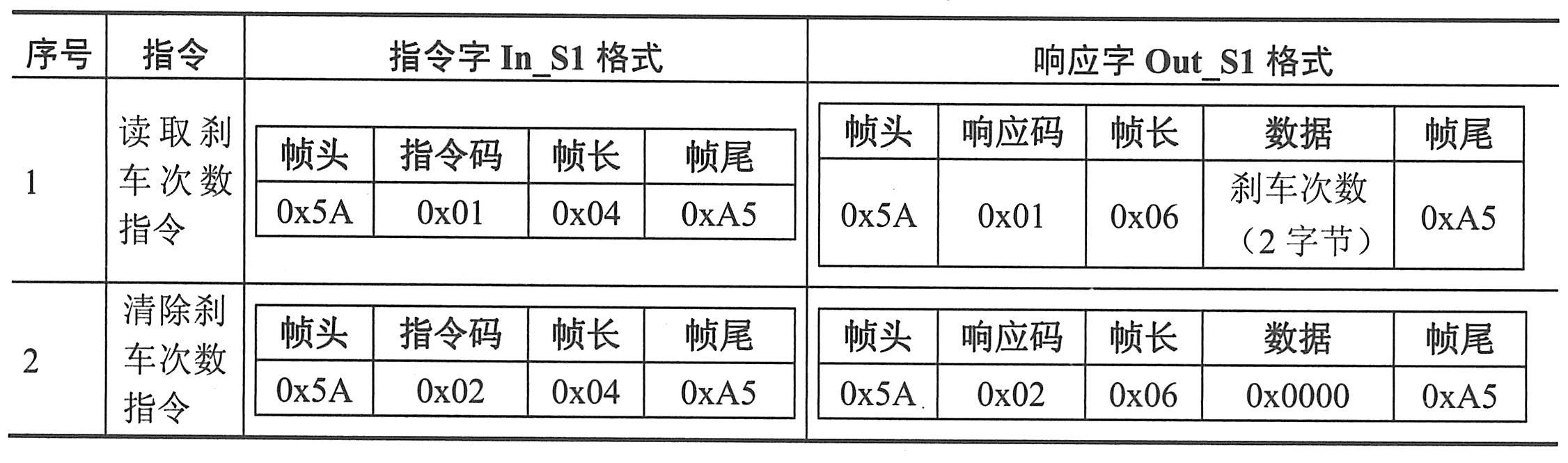
(4)响应中央控制器指令:接收来自中央控制器的串行口指令字In_S1,回送串行口响应字Out_S1。当接收的指令字错误时,软件直接丢弃该命令字,不进行任何响应。
|
|
|
|
|
|
|
|
|
|
|
|
1.请简述本软件串行输入接口测试的测试策略及测试内容。针对上表中“读取刹车次数指令”进行鲁棒性测试时应考虑哪些情况?
|
|
|
|
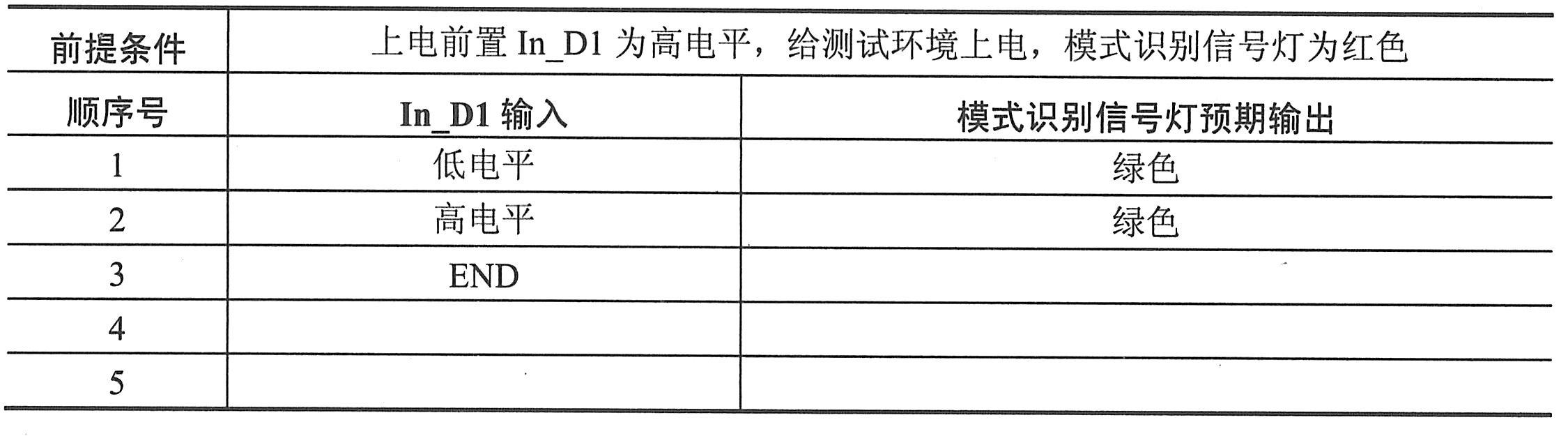
2.某测试人员设计了下表所示的操作步骤对模式选择功能进行测试(表中END表示用例到此结束)。
|
|
|
|
|
|
|
|
为进一步提高刹车控制软件的安全性,在需求中增加了设计约束:软件在单次运行过程中,若进入正常工作模式,则不得再进入维护模式。请参照上表的测试用例完成下表,用于测试该设计约束。
|
|
|
|
|
|
|
|
3.本项目在开发过程中通过测试发现了17个错误,后期独立测试发现了31个软件错误,在实际使用中用户反馈了两个错误。请计算缺陷探测率(DDP)。
|
|
|
|
|
|
1.对所有的测试而言,都必须进行正常测试和异常测试,在本问题中对测试对象实例化为串行输入接口。串行输入接口在本题的需求描述中,根据下表内容,负责接收读取刹车次数和清除刹车次数两种指令,故测试内容为此两种指令。对“读取刹车次数指令”进行鲁棒性测试时应考虑的情况,其实也是接口鲁棒性测试概念的一个实例化,对接口的数据包而言,至少应该包括帧头错误、数据长度错误、数据错误、校验和错误、校验码错误以、帧尾错误以及其他防止指令错误手段的错误等。对本题的实例化而言,具体包括帧头错误、指令码错误、帧长错误、帧尾错误以及整个指令长度超过4字节的情况。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
对“读取刹车次数指令”鲁棒性测试时应考虑输入接口帧头错误、指令码错误、帧长错误、帧尾错误以及整个指令长度超过4字节的情况。
|
|
|
|
|
|
|
|
2.如果不考虑约束,软件工作状态从组合的角度来说,上表的测试顺序完全符合要求。但是许多软件在实际使用中,由于真实情况的限制,不能从理论的情况进行组合,对一些条件必须要进行约束。例如本题中,在单次进入正常工作模式后,就不能进入维护模式,因为维护模式是一种检修模式,不能再正常工作中,进行检修,所以必须保证在正常工作模式下,对维护模式命令不响应。所以此题的前提条件应该为“上电前置In_D1为高电平,给测试环境上电,模式识别信号灯为红色”,即在上电后首先让工作模式为维护模式;然后再发送进入正常工作模式命令,灯变绿,进入工作模式;最后在正常工作模式下,发送进入维护模式命令,此时软件应该不响应,灯继续为绿色,表示在工作模式,完成带约束条件的状态转换测试。如果此题继续上表的测试前提条件,不管发送什么命令,灯一直不会变化,就无法判断是软件问题还是测试设备问题,无法完成测试。完善后的下表如下。
|
|
|
|
|
|
|
|
3.缺陷探测率(DDP)定义为测试发现的软件问题与软件中总共发现的问题之比。
|
|
|
|
对于本问题,缺陷探测率(DDP)=(17+31)/(17+31+2)=96%
|
|
|