|
|
|
|
|
|
|
|
|
|
|
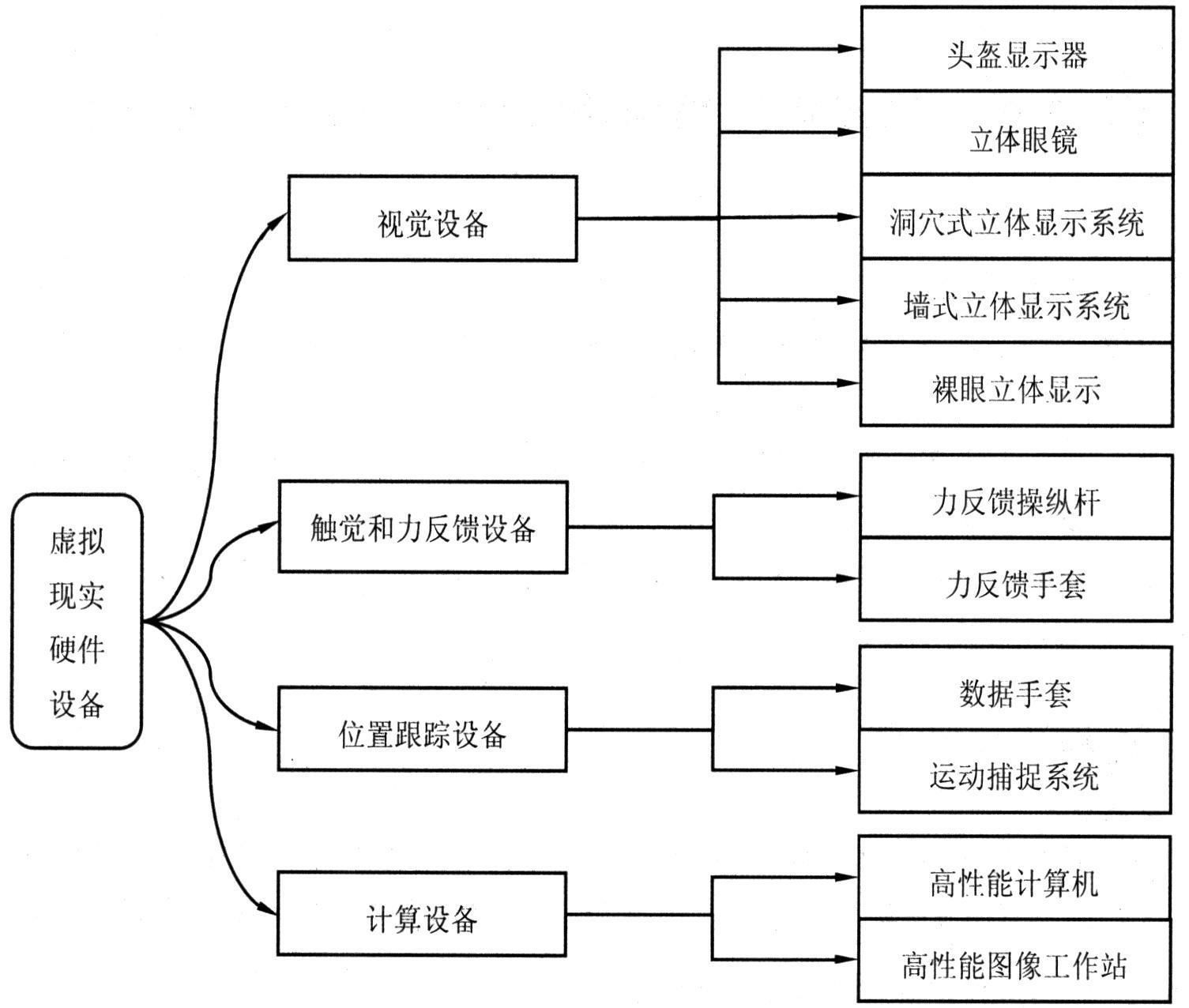
为了使虚拟环境有效地模拟现实环境,实现自然和谐的人机交互并使用户产生较强的沉浸感,虚拟现实系统需要特定的硬件和软件环境支撑。虚拟现实硬件设备可以分为视觉设备、触觉和力反馈设备、位置跟踪设备和计算设备,如下图所示。
|
|
|
|
|
|
|
|
|
|
现实世界是三维世界,人眼观察物体时看到的图像具有位差,两幅图像之间的偏差称为视差(disparity/parallax)。正是这种视差使人们能区别物体的远近,并获得立体感。根据视差值的不同,视差又可分为正视差(positive parallax)、负视差(negative parallax)和零视差(zero parallax)。当人们在观察时,正视差使人产生物体深入屏幕的感觉,负视差使人产生物体悬浮于屏幕外的感觉,零视差是正视差和负视差的分界,物体刚好被投射到屏幕上,即人们常说的零平面。夏天夜晚的星星距离人们很远,人们观看星星的视线几乎是平行的,这时视差接近于零,人眼难以区分星星的距离,因此人们觉得星星仿佛在一个平面上,没有立体感。
|
|
|
|
人的大脑是一个极其复杂的神经系统,它可以将映入双眼的两幅具有视差的图像经视神经中枢的融合反射和视觉心理反应产生三维立体感。利用这个原理,可以将两幅具有视差的左右图像通过显示器显示,将其分别送给左眼和右眼,从而获得立体感。
|
|
|
|
|
|
头盔显示器是虚拟现实应用中的3D VR图形显示与观察设备,可单独与主机相连以接收来自主机的3D VR图形信号。使用方式为头戴式,辅以三个自由度的空间跟踪定位器即可进行VR输出效果的观察,同时观察者可进行空间上的自由移动,沉浸感较强,如下图所示。
|
|
|
|
|
|
|
|
头盔是最早的虚拟现实显示器,其显示原理是左右眼屏幕分别显示左右眼的图像,人眼在获取这种带有差异的信息后可以在脑海中产生立体感。
|
|
|
|
由于头盔显示器的屏幕距离眼睛很近,因此为了使眼睛聚焦到如此近的距离且不易产生疲劳,需要使用专门的镜片,并且此镜片必须能够放大图像,向双眼提供尽可能宽的视野。
|
|
|
|
头盔显示系统主要由显示器和光学透镜两部分组成。目前显示器有很多,如阴极射线管(CRT)、液晶显示器(LCD)、VRD类和硅VLSI显示器等。
|
|
|
|
|
|
立体眼镜采用了当今最先进的时分法,通过立体眼镜与显示器同步的信号实现。当显示器输出左眼图像时,左眼镜片为透光状态,而右眼为不透光状态,而在显示器输出右眼图像时,右眼镜片透光而左眼镜片不透光,这样两只眼睛就看到了不同的画面,达到了欺骗眼睛的目的。
|
|
|
|
这样频繁地切换以使双眼分别获得有细微差别的图像,经过大脑计算从而生成一幅立体图像。立体眼镜在设计上采用了精良的光学部件,与被动式眼镜相比,可实现每只眼睛的双倍分辨率以及更宽的视角。
|
|
|
|
偏振光眼镜在3D影院中被广泛使用,其镜片颜色有茶色、灰色和墨绿色。光波中有自然光和偏振光两种。自然光的电磁波是向四面八方振动的,即出现光线的漫反射。而偏振镜片中间的胶膜内含有无数细小的杆状晶体,均朝一个方向顺序均匀地排列,故通过偏振眼镜后的光线只能朝一个方向振动。从波动光学看,自然光是以线为中心向各个方向振动的,将横向振动的光滤出后,剩下的就是偏振光,再将垂直方向的光波滤出后,得到的就是偏振光滤光镜(偏振镜),它的作用就是滤除部分的光。这种滤光作用不改变光的成分,只减少光的量,因此这种作业只对非金属有减少反光的作用,如下图所示。
|
|
|
|
|
|
|
|
|
|
洞穴式立体显示系统使用投影系统投射多个投影面,形成房间式的空间结构,使得观察者周围具有多个图像画面显示,以增强沉浸感。
|
|
|
|
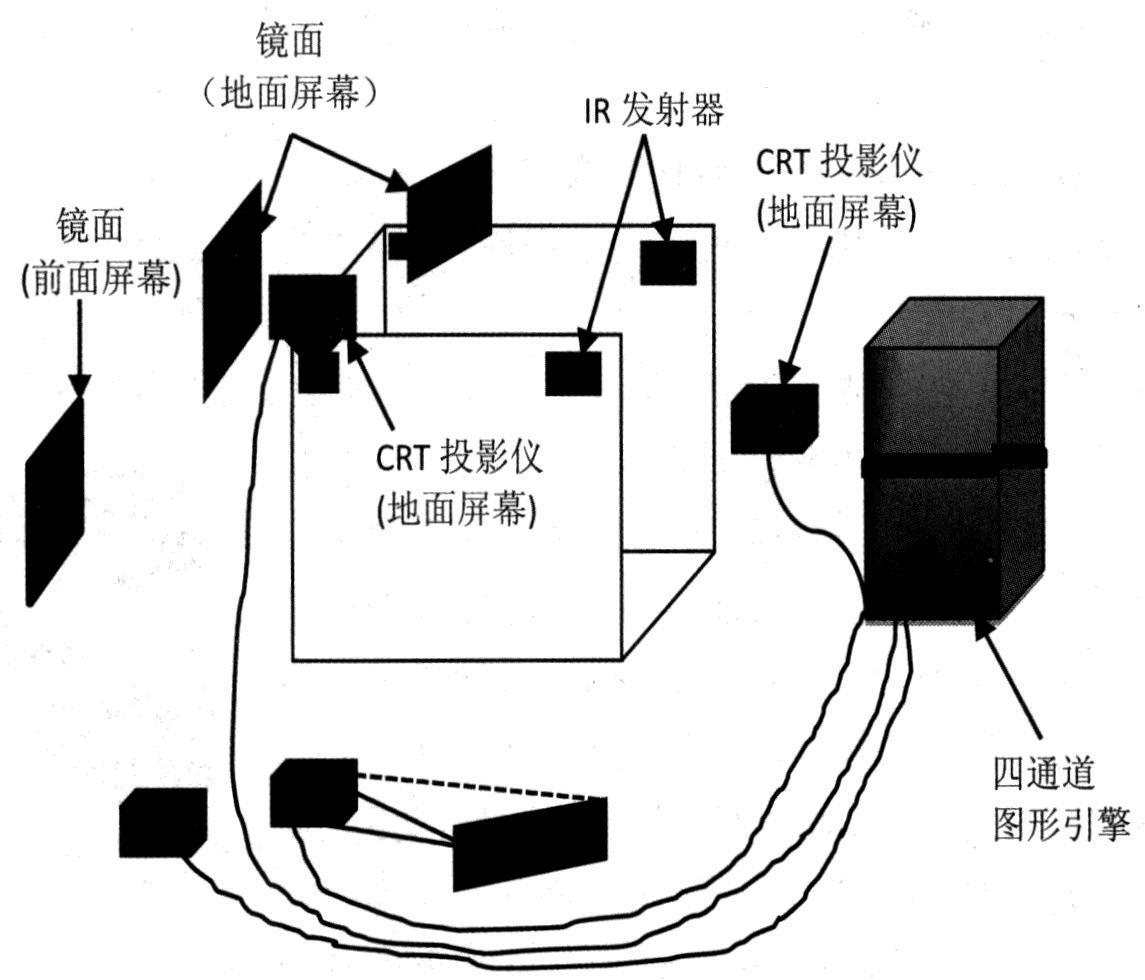
洞穴式立体显示系统简称CAVE系统。CAVE系统是一种基于多通道视景同步技术和立体显示技术的房间式投影可视协同环境,该系统可提供一个房间大小的4面、5面或者6面的立方体投影显示空间,供多人参与。所有参与者均完全沉浸在一个被立体投影画面包围的高级虚拟仿真环境中,借助音响技术和相应的虚拟现实交互设备获得一种身临其境的高分辨率三维立体视听影像和六自由度交互感受。由于投影面几乎能够覆盖所有视野,因此CAVE系统能提供给使用者一种前所未有的、震撼的、身临其境的沉浸感受。CAVE系统的空间结构如下图所示。
|
|
|
|
|
|
|
|
|
|
为了解决更多观众共享立体图像的问题,人们提出了采用大屏幕投影显示器组成的墙式立体显示系统。此系统类似于放映电影的背投式显示设备。由于屏幕大、可容纳的人数多,因此适用于教学和成果演示,目前常用的有单通道立体投影系统和多通道立体投影系统。
|
|
|
|
|
|
单通道被动式立体成像原理使用了两台投影机,一台投射左眼图像,另外一台投射右眼图像,将左右眼图像同时投射到屏幕上。投影机镜头前安装了偏振光片,使投射的光线变成偏振光,而观众佩戴的立体眼镜的镜片也是偏振光片,并且左眼的偏振片与投射左眼图像的投影机的偏振光片的偏振方向是相同的,右眼的偏振片与投射右眼图像的投影机的偏振光片的偏振方向是相同的。这样左眼图像只能透过左眼镜片,右眼图像只能透过右眼镜片,从而使观众看到立体的图像。
|
|
|
|
|
|
多通道环幕立体投影是指采用多台投影机组合而成的多通道大屏幕展示系统,它比普通的标准投影系统具备更大的显示尺寸、更宽的视野、更多的显示内容、更高的显示分辨率以及更具冲击力和沉浸感的视觉效果。该系统可以应用于教学、视频播放、电影播放等。
|
|
|
|
采用弧形环状的投影屏幕作为投射载体,利用多台投影机投射出无缝、统一、逼真、立体的完美影像,配合环绕立体音响系统打造出沉浸式的、身临其境般的虚拟显示环境,也可称之为环幕投影或弧幕投影。
|
|
|
|
按环形幕半径的大小可分为120°、135°、180°、240°、270°、360°等弧度环幕,也可定制不规则环形幕。一般分为双通道、三通道、七通道等,其中双通道和三通道是最常用的。
|
|
|
|
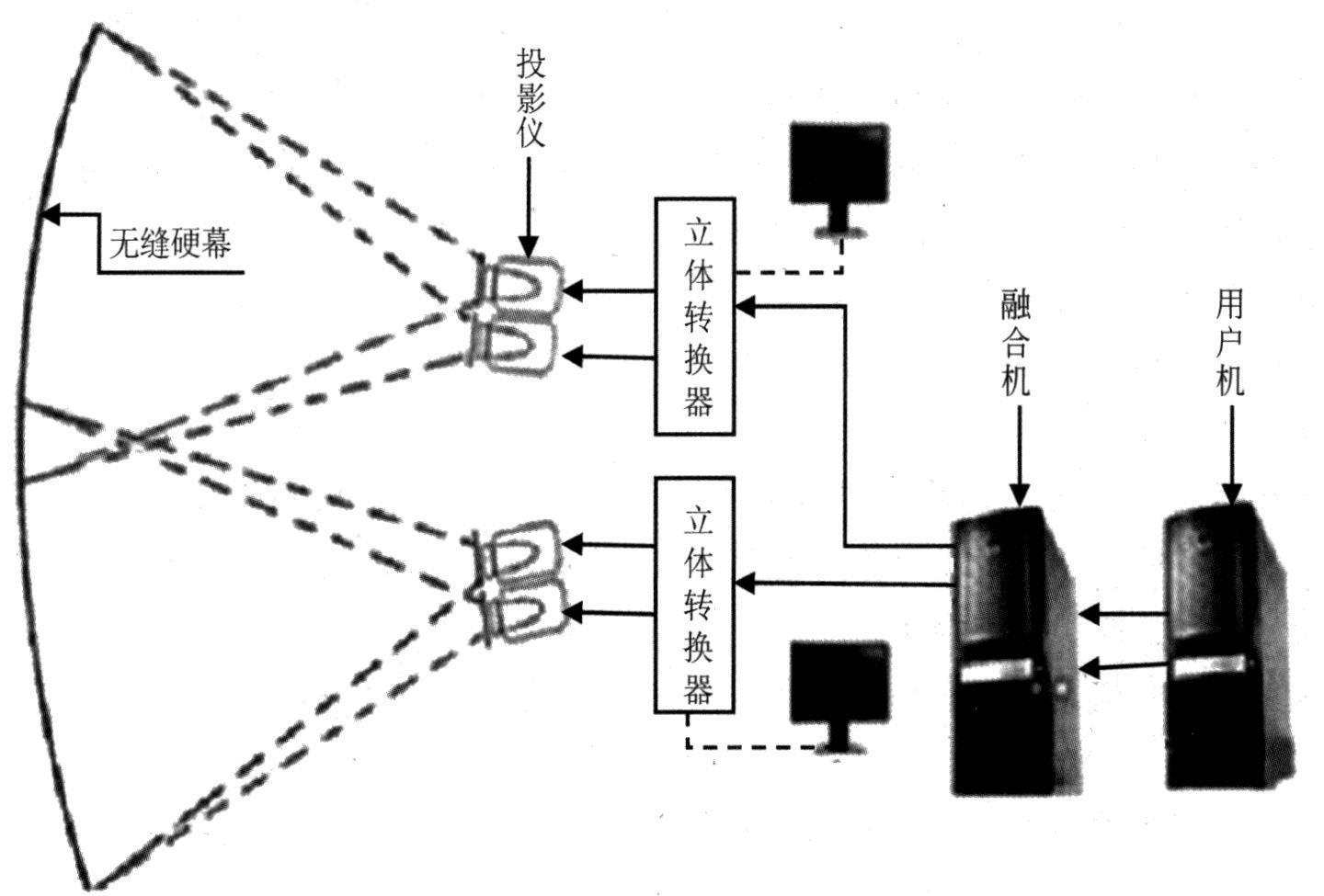
双通道和三通道立体虚拟仿真环幕投影大屏幕是虚拟三维投影显示系统中的一种沉浸式虚拟仿真显示环境,该系统采用边缘融合技术把多台投影机投射出的图像形成立体数字图像实时输出并显示在一个超大幅面的平面投影幕墙上,使观看者和参与者获得一种身临其境的虚拟仿真视觉感受。环幕投影显示屏幕的巨大弧度和显示特征导致了它的实现技术更为复杂性,需要多种核心技术作为整个系统的支撑,如数字几何矫正技术、多通道视景同步控制技术、边缘融合技术,从而形成一个具有极高分辨率、无任何变形失真的数字三维立体影像,如下图所示。
|
|
|
|
|
|
|
|
|
|
裸眼立体显示的原理一般是通过光栅或透镜将显示器显示的图像进行分光,从而使人眼接收到不同的图像,这样便实现了立体显示。狭缝光栅显示器通过在显示面板前方放置一个参数合适的狭缝对显示的内容进行遮挡,在经过一定距离后,到达人眼的光线便可被分开,双眼接收到两幅含有视差的图像。
|
|
|
|
柱状透镜式采用了相同的原理,只是实现的方式由狭缝变成了透镜,透镜通过对光的折射作用将不同的显示内容折射到空间中的不同地方,到达人眼时显示的内容被分开,人眼接收到两幅含有视差的图像,这样便产生了立体效果。
|
|
|
|
因此,裸眼立体显示仍基于立体视觉原理,只是通过改进立体显示器,以特定光学遮挡和光路传播控制的方式,实现将含有视差的图像分别传送到左右眼,进而观看到立体影像。
|
|
|
|
|
|
|
|
力反馈操纵杆(也称触觉反馈操纵杆)的基本思路是将操纵杆的运动与屏幕上的动作联系起来,如下图所示。
|
|
|
|
|
|
|
|
力反馈操纵杆的大部分组件与普通的操纵杆相同,只是增加了几个重要组件:一个板载微处理器、几台电动机以及一个齿轮传动系统或皮带传动系统。
|
|
|
|
与操纵杆相连的X方向轴和Y方向轴均与皮带轮连接在一起。每根轴的皮带的另一端与一个电动机的转轴连接在一起。在这个机构中,旋转电动机轴将移动皮带,从而带动方向轴转动;转动方向轴也将移动皮带,从而带动电动机转轴旋转。皮带的作用是传递和放大从电动机到方向轴的作用力。
|
|
|
|
板载处理器和操纵杆的物理运动所产生的电信号都会使电动机轴旋转。这样,在电动机移动操纵杆的同时,用户仍然可以移动操纵杆。
|
|
|
|
在电动机的另一端,其转轴与操纵杆的位置传感器(如分压器或者光学传感器)相连。只要操纵杆发生移动,无论这种移动是由电动机引起的还是用户引起的,传感器都可以检测出操纵杆的位置。
|
|
|
|
操纵杆有一个内置的ROM芯片,用来存储各种电动机动作序列。例如,其中可能会有一个机关枪动作序列要求电动机快速地改变方向,或一个火箭筒动作序列要求电动机突然来回移动操纵杆。游戏软件请求特定的序列,计算机将请求传输到操纵杆的板载处理器上,处理器从自身的存储器中读取相应的数据。这种方式减轻了计算机的工作负荷,有利于提高反应速度。
|
|
|
|
随着操纵杆技术的不断发展,制造商会逐渐将作用力反馈技术提高到一个全新的水平。
|
|
|
|
|
|
力反馈手套是一款最接近人手的机械手,可以直接把人体动作绘制到机器设备,内部集成了传感和位置控制器,允许外部计算机对其进行准确控制,也可以与用户现有的机器平台连接使用。
|
|
|
|
力反馈系统一般含有一个集成了多个“空气肌肉”的存储库,可带动该产品。“空气肌肉”实际上是一种传动装置,具有小巧、轻便、简单和操作方便等特点。该传动器很柔软,无吸附现象,可轻松控制,而且异常有力,有很强的适应性,使机械手能够触碰柔软易碎的物体。可以在手套的指端安装触觉传感器,其灵敏度足以探测到一枚硬币。
|
|
|
|
|
|
|
|
数据手套是一种多模式的虚拟现实硬件,通过软件编程可进行虚拟场景中物体的抓取、移动、旋转等动作,也可以利用它的多模式性作为控制场景漫游的工具。数据手套的出现为虚拟现实系统提供了一种全新的交互手段,目前的产品已经能够检测手指的弯曲,并利用磁定位传感器精确地定位出手在三维空间中的位置。这种结合手指弯曲度测试和空间定位测试的数据手套被称为真实手套,可以为用户提供一种真实自然的三维交互手段,如下图所示。
|
|
|
|
|
|
|
|
数据手套是虚拟仿真中最常用的交互工具。数据手套按功能需要一般可以分为虚拟现实数据手套、力反馈数据手套。
|
|
|
|
数据手套设有弯曲传感器,由柔性电路板、力敏元件、弹性封装材料组成,通过导线连接至信号处理电路;在柔性电路板上设有至少两根导线,以力敏材料包覆于柔性电路板的绝大部分,再在力敏材料上包覆一层弹性封装材料,柔性电路板留一端在外,以导线与外电路连接。把人手姿态准确实时地传递给虚拟环境,而且能够把与虚拟物体的接触信息反馈给操作者,使操作者以更加直接、自然、有效的方式与虚拟世界进行交互,大大增强了互动性和沉浸感,并为操作者提供了一种通用、直接的人机交互方式,特别适用于需要多自由度手模型对虚拟物体进行复杂操作的虚拟现实系统。
|
|
|
|
数据手套本身不提供与空间位置相关的信息,必须与位置跟踪设备相连使用。
|
|
|
|
|
|
运动捕捉系统是一种用于准确测量运动物体在三维空间运动状况的高技术设备,它基于计算机图形学原理,通过排布在空间中的数个视频捕捉设备将运动物体(跟踪器)的运动状况以图像的形式记录下来,然后使用计算机对该图像数据进行处理,得到不同时间计量单位上不同物体(跟踪器)的空间坐标(X, Y, Z)。
|
|
|
|
从技术的角度来说,运动捕捉的实质就是要测量、跟踪、记录物体在三维空间中的运动轨迹。典型的运动捕捉设备一般由以下几个部分组成。
|
|
|
|
①传感器。传感器是固定在运动物体特定部位的跟踪装置,它将向系统提供运动物体的位置信息,会随着捕捉的细致程度确定跟踪器的数目。
|
|
|
|
②信号捕捉。负责捕捉,识别传感器的信号,并将运动数据从信号捕捉设备快速、准确地传送到计算机系统。这种设备会因系统的类型不同而有所区别,它们负责位置信号的捕捉。对于机械系统来说,它是一块捕捉电信号的线路板,对于光学系统,它是高分辨率红外摄像机。
|
|
|
|
③数据传输。实时系统需要将大量的运动数据从信号捕捉设备快速、准确地传输到计算机系统进行处理,而数据传输设备就是用来完成此项工作的。
|
|
|
|
④数据处理。系统捕捉到的数据需要修正,处理后还要通过三维模型结合才能完成计算机动画制作的工作,这就需要应用数据处理软件或硬件完成此项工作。软件也好,硬件也罢,它们都是借助计算机对数据高速的运算能力完成数据处理的,使三维模型真正、自然地运动起来,所以它负责处理系统捕捉到的原始信号、计算传感器的运动轨迹、对数据进行修正和处理,并与三维角色模型相结合。
|
|
|
|
|
|
|
|
HPC(High Performance Computing)是高性能计算机群的简称,指能够执行一般个人计算机无法处理的大资料量与高速运算的计算机,其基本组成组件与个人计算机的概念无太大差异,但规格与性能则强大许多。现有的超级计算机的运算速度基本可以达到每秒一兆(万亿)次以上。
|
|
|
|
构建高性能计算系统的主要目的是提高运算速度,要想达到每秒万亿次级的计算速度,对系统的处理器、内存带宽、运算方式、系统I/O、存储等方面的要求都十分高,这其中的每一个环节都将直接影响系统的运算速度。HPC这类机群主要解决大规模科学问题的计算和海量数据的处理,如科学研究、气象预报、计算模拟、军事研究、CFD/CAE、生物制药、基因测序、图像处理等。
|
|
|
|
信息服务机群的应用范围很广泛,包括数据中心、电子政务、电子图书馆、大中型网站、网络游戏、金融电信服务、城域网/校园网、大型邮件系统、VOD、管理信息系统等。就其实现方式,还可以将其分为负载均衡机群、高可用机群等。
|
|
|
|
简单地说,高性能计算是计算机科学的一个分支,研究并行算法和开发相关软件,致力于开发高性能计算机。
|
|
|
|
|
|
“图形工作站”是专业从事图形、图像(静态)、图像(动态)与视频工作的高档次专用计算机的总称。从工作站的用途来看,无论是三维动画、数据可视化处理,还是CAD/CAM和EDA,都要求系统具有很强的图形处理能力,从这个意义上来说,可以认为大部分工作站都是图形工作站。
|
|
|
|
一般说来,计算机图形是将抽象的数据信息转换成计算机显示器的发光点的过程,不同类型的抽象信息需要不同类型的处理过程。抽象信息通常分为2D或3D,二者有着本质的不同:2D图形用2D向量、2D区域和光栅数据,而3D图形使用3D向量和3D表面。3D表面具有不同的光高度和不同的颜色,可以透明或不透明,也可以是堆叠的对象。3D图形常用来表达以下信息:
|
|
|
|
|
|
|
|
. 高性能计算,如有限元分析、流体计算、材料模拟计算、分子模拟计算等;
|
|
|
|
|
|
. 影视动画,如3D动画、视频编辑、特效合成、动画渲染等。
|
|
|