|
|
|
颜色空间是颜色集合的数学表示。颜色空间的表示方法有很多,最常用的颜色模型有:RGB、CMYK、YIQ、YUV、YCbCr、HSI、HSV。
|
|
|
|
|
|
RGB颜色空间是最常用的一种颜色表示方法,任何一种颜色都可以利用红(Red)、绿(Green)和蓝(Blue)三种颜色混合而成,公式如下。
|
|
|
|
|
|
其中,C表示任何一种颜色,a、b、c是系数,需满足a, b, c均大于0且a+b+c=1。
|
|
|
|
在计算机系统中,通常利用1字节的整数表示RGB所占的系数分量,常见的一些颜色系数分量如下表所示。
|
|
|
|
|
|
|
|
RGB颜色空间主用应用于彩色显示器、计算机图形学等领域。CRT显示器利用RGB三种颜色的电子枪投射到屏幕上形成彩色图像。LCD显示器的每个单元格前面都有RGB三个过滤器,当光线通过单元格时就可以在屏幕上显示出彩色图像。另外,在计算机图形学中,RGB颜色空间可以简化系统的构架与设计,所以通常被采用。
|
|
|
|
|
|
CMY分别是指青色(Cyan)、洋红色(Magenta)、黄色(Yellow),这三种颜色分别是RGB三种颜色的互补色,即如果两种颜色混合后形成中性的灰黑色,则这两种色彩为互补色。
|
|
|
|
CMYK颜色空间主要用于印刷,也称印刷色彩模式。从理论上来说,印刷只需要CMY三种油墨就足够了,它们加在一起就能得到黑色,但是由于目前的制造工艺还不能制造出高纯度的油墨,CMY相加的实际结果是暗红色,因此还需要加入一种专门的黑墨(Black)进行调和。
|
|
|
|
CMYK和RGB相比有一个很大的不同:RGB模式是一种发光的色彩模式,在黑暗的房间内仍然可以看见屏幕上的内容,这是因为屏幕本身可以发光;CMYK是一种依靠反光的色彩模式,CMYK颜色模式的基础并不是增加光线,而是减去光线。人们是怎样阅读报纸的呢?这是由于阳光或灯光照射到报纸上再反射到人们的眼中,因此人们才能看到内容,它需要外界光源,而在黑暗的房间内人们是无法阅读报纸的。所以RGB又称加色模型,而CMYK则称为减色模型。
|
|
|
|
|
|
发明电视以后,为了更有效地压缩图像的数据量以充分利用传输通道的带宽或节省存储空间,人们开发了许多颜色空间,如模拟PAL和SECAM彩色电视制式采用的YUV颜色空间,NTSC彩色电视制式采用的YIQ颜色空间,数字电视系统采用的YCrCb颜色空间。这些颜色空间都需要把用RGB颜色空间表示的电视图像转换成用其他颜色空间表示的图像。
|
|
|
|
在YUV颜色空间中,Y表示亮度,也就是灰度值,U和V表示色差。亮度是通过RGB输入信号建立的,方法是将RGB信号的特定部分叠加到一起。色差信号的作用是描述影像色彩及饱和度,用于指定像素的颜色。
|
|
|
|
YIQ颜色空间的参数值与YUV相似,Y表示明亮度,I和Q表示色差。所不同的是,Q、I正交坐标轴与U、V正交坐标轴之间有33°的夹角。
|
|
|
|
YCrCb是从YUV颜色空间派生的一个颜色空间,主要用于数字电视系统。其中,Y仍表示明亮度,Cr反映了RGB输入信号的红色部分与RGB信号亮度值之间的差异,Cb反映的是RGB输入信号蓝色部分与RGB信号亮度值之间的差异。
|
|
|
|
电视系统所采用的颜色空间的主要优点有两个:一是亮度信号和色度信号相互独立,即Y信号分量构成的黑白灰度图与用U、V信号(以YUV颜色空间为例)构成的两幅单色图是相互独立的,这就使得人们可以对YUV三个信号分别进行编码,也使得彩色电视信号和黑白电视信号可以相互兼容;二是可以利用人眼的特性降低数字彩色图像所需要的存储容量,由于人眼对色彩细节的分辨能力远比对亮度细节的分辨能力低,所以可以把色彩分量的分辨率降低而不明显影响图像的质量。
|
|
|
|
|
|
此类颜色空间是从人的视觉系统出发的,利用色调(hue)、颜色饱和度(saturation)和明亮度(intensity或value)描述色彩。色调是当人眼看到一种或多种波长的光时所产生的色彩感觉,它反映颜色的种类,是决定颜色的基本特征;饱和度是指颜色的纯度,即掺入白光的程度,表示颜色的深浅程度;明亮度是光作用于人眼所引起的明亮程度的感觉,它与被观察物体的发光强度有关,主要表现光的强和弱。
|
|
|
|
HSI和HSV颜色空间的差异在于亮度分量(I或V)的计算方式。HSI颜色空间适合传统的图像处理函数,如卷积、均化、直方图等,可以通过处理亮度值实现这些操作,因为亮度I对R、G、B值的依赖程度是一样的。HSV颜色空间适合处理色度和饱和度,因为它可以使饱和度具有更大的动态取值范围。HSV使用单六角锥的颜色模型,HSI使用双六角锥的颜色模型。
|
|
|
|
由于HSI和HSV颜色空间在设计及颜色感知和解释的方式上与人很接近,因此人们在手动指定颜色值时会经常使用它们,例如在图像设计软件Photoshop中。
|
|
|
|
|
|
RGB颜色模型采用物理三基色,其物理意义非常清楚,但它是一种与设备相关的颜色模型,即每一种设备(包括人眼、扫描仪、监视器和打印机等)使用RGB模型时都有不太相同的定义,这就造成这些设备之间的颜色不能相互通用。
|
|
|
|
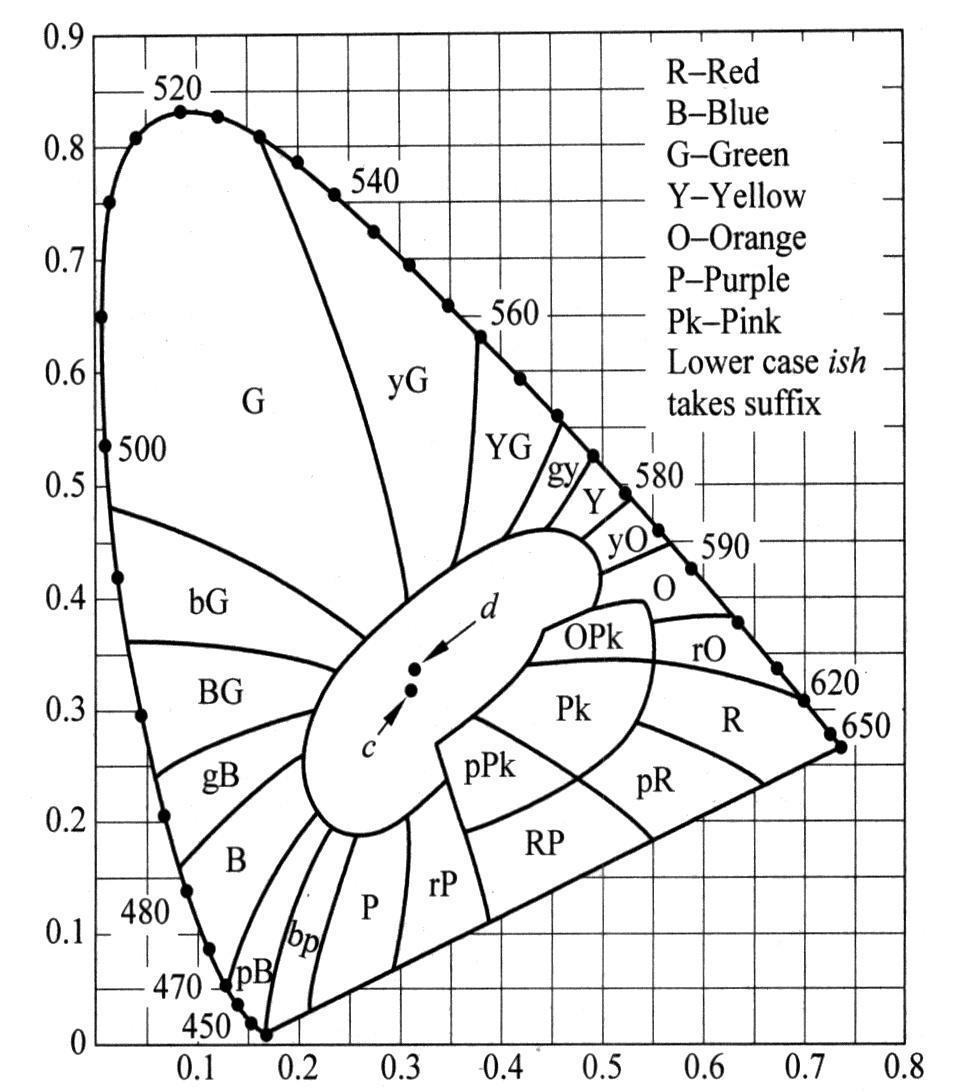
为了从基色出发定义一种与设备无关的颜色模型,1931年9月,国际照明委员会(Commission Internationale de L'Eclairage, CIE)在英国召开了具有历史意义的大会。CIE的颜色科学家在RGB模型的基础上创建了一个新的颜色系统——CIE XYZ。在CIE XYZ色彩空间中,三刺激值并不是真正的红色、绿色和蓝色,而是从红色、绿色和蓝色导出来的参数,近似对应于红色、绿色和蓝色。CIE 1931色度图如下图所示,横坐标表示红色分量,纵坐标表示绿色分量。环绕在颜色空间边沿的颜色是光谱色,边界代表光谱色的最大饱和度,边界上的数字表示光谱色的波长,其轮廓包含所有的感知色调。所有单色光都位于舌形曲线上,这条曲线就是单色轨迹,曲线旁标注的数字是单色(或称光谱色)光的波长值;自然界中各种实际颜色都位于这条闭合曲线内;RGB系统中选用的物理三基色也在色度图的舌形曲线上。
|
|
|
|
|
|
|
|
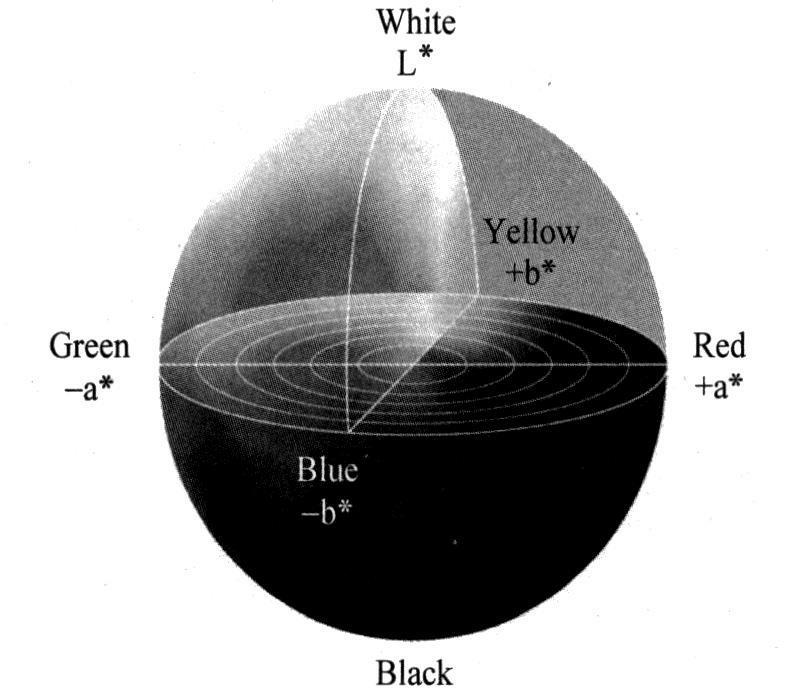
1976年,CIE又召开了一次具有重要意义的会议,在该会议上规定了两种颜色空间:一种是用于自照明的颜色空间,称为CIE LUV;另一种是用于非自照明的颜色空间,称为CIE 1976L*a*b*,或称CIE LAB。CIE LUV是由CIE XYZ空间简单变换得到的,具有视觉统一性。CIE LAB系统使用的坐标称为对色坐标(opponent color coordinate),如下图所示。CIE LAB使用b*、a*和L*坐标轴定义CIE颜色空间,其中L*代表光亮度,其值为0(黑色)~100(白色),b*和a*代表色度坐标,其中a*代表红-绿轴,b*代表黄-蓝轴,它们的值为0~10。a*=b*=0表示无色,因此L*代表从黑到白的比例系数。
|
|
|
|
|
|
|