|
|
|
高速缓存(Cache)由快速半导体存储器构成,用来存放当前最活跃的程序和数据,其内容是主存局部域的副本,对程序员来说是透明的。
|
|
|
|
|
|
Cache存储器中控制部分的功能是判断CPU要访问的信息是否在Cache存储器中,若在即为命中,若不在则没有命中。命中时直接对Cache存储器寻址;未命中时,要按照替换原则决定主存的一块信息放到Cache存储器的哪一块里。
|
|
|
|
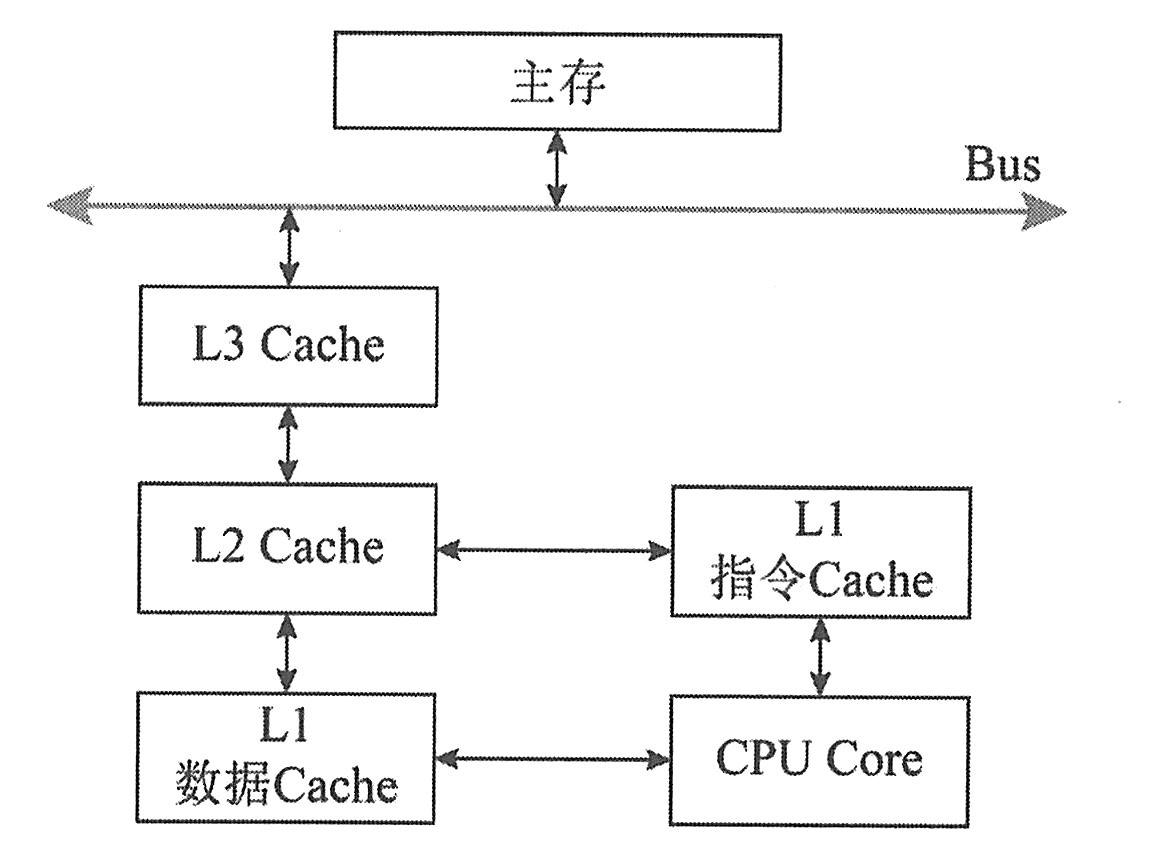
现代CPU中Cache分为了多个层级,如下图所示。
|
|
|
|
|
|
|
|
在多级Cache的计算机中,Cache分为一级(L1 Cache)、二级(L2Cache)、三级(L3 Cache)等,CPU访存时首先查找L1 Cache,如果不命中,则访问L2Cache,直到所有级别的Cache都不命中,才访问主存。通常要求L1 Cache的速度足够快,以赶上CPU的主频。如果Cache为两级,则L1 Cache的容量一般都比较小,为几千字节到几十千字节;L2 Cache则具有较高的容量,一般为几百字节到几兆字节,以使高速缓存具有足够高的命中率。
|
|
|
|
|
|
在CPU工作时,送出的是主存单元的地址,而应从Cache存储器中读/写信息。这就需要将主存地址转换成Cache存储器的地址,这种地址的转换称为地址映像。Cache的地址映像有如下3种方法。
|
|
|
|
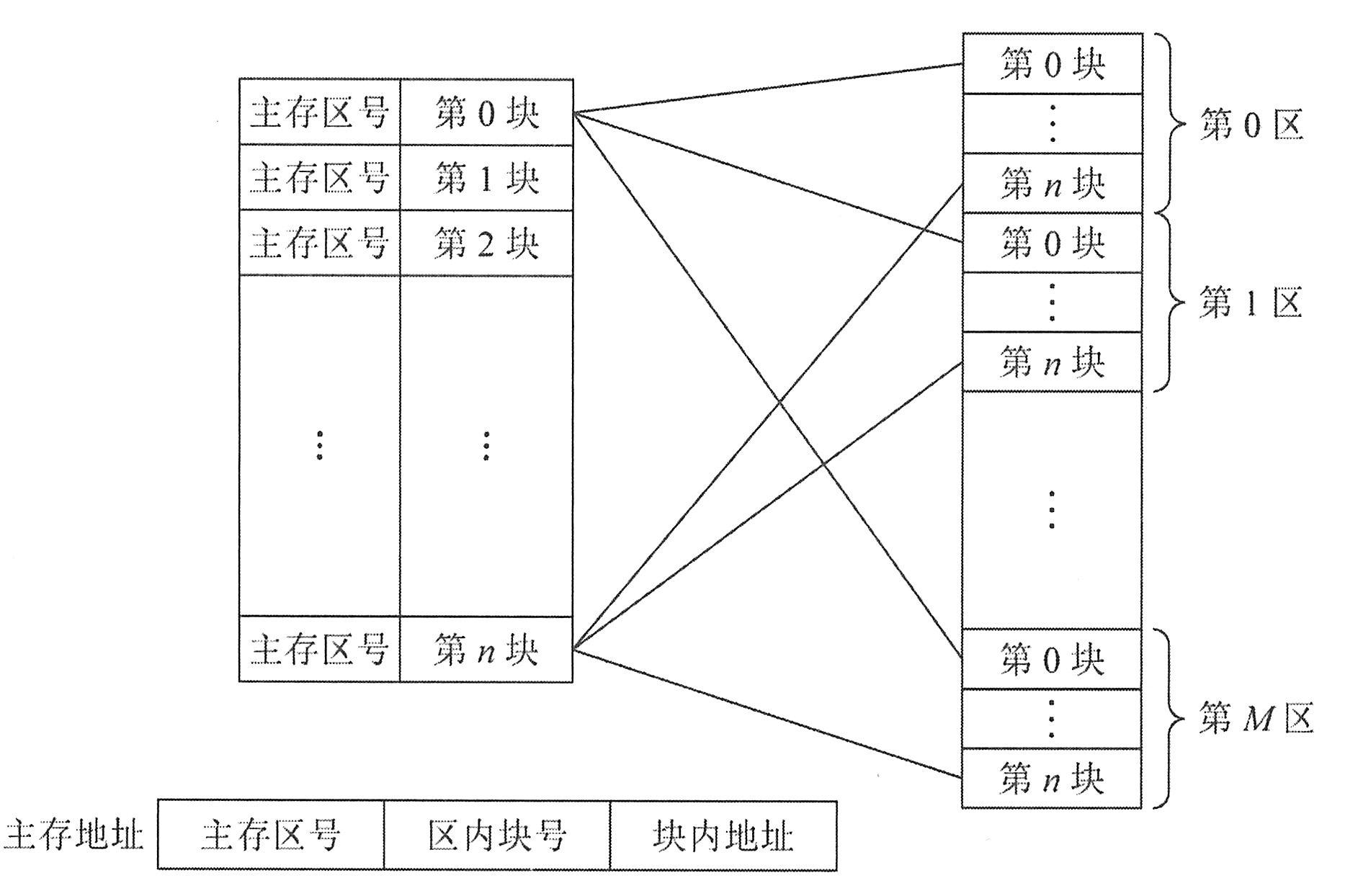
(1)直接映像。直接映像是指主存的块与Cache块的对应关系是固定的,如下图所示。
|
|
|
|
|
|
|
|
在这种映像方式下,由于主存中的块只能存放在Cache存储器的相同块号中,因此,只要主存地址中的主存区号与Cache中记录的主存区号相同,则表明访问Cache命中。一旦命中,由主存地址中的区内块号立即可得到要访问的Cache存储器中的块,而块内地址就是主存地址中给出的低位地址。
|
|
|
|
直接映像方式的优点是地址变换很简单,缺点是灵活性差。例如,不同区号中块号相同的块无法同时调入Cache存储器,即使Cache存储器中有空闲的块也不能利用。
|
|
|
|
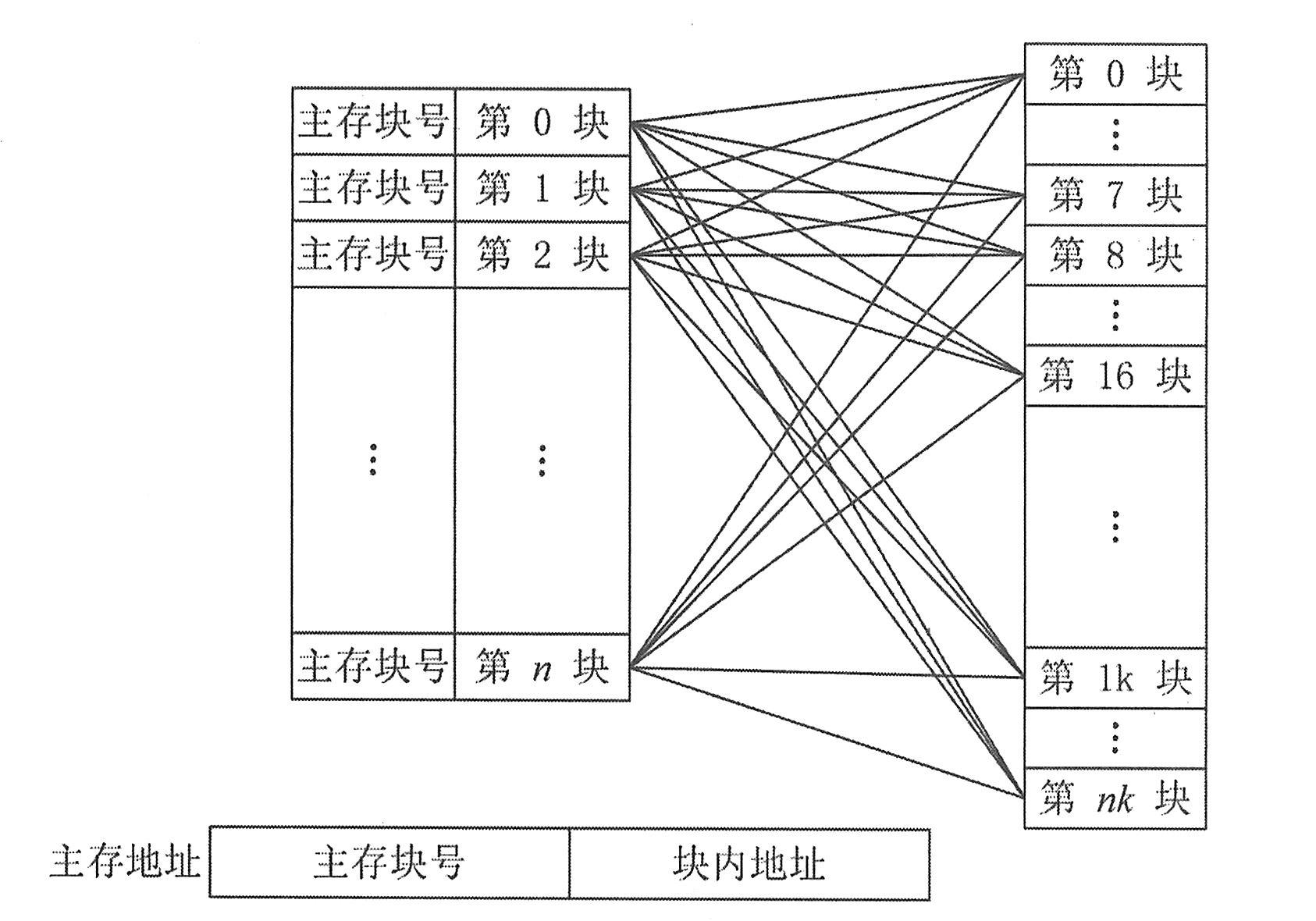
(2)全相联映像。全相联映像如下图所示。同样,主存与Cache存储器均分成大小相同的块。这种映像方式允许主存的任一块可以调入Cache存储器的任何一个块的空间中。
|
|
|
|
|
|
|
|
例如,主存为64MB,Cache为32KB,块的大小为4KB(块内地址需要12位),因此主存分为16384块,块号从0~16383,表示块号需要14位,Cache分为8块,块号为0~7,表示块号需3位。存放主存块号的相联存储器需要有Cache块个数相同数目的单元(该例中为8),相联存储器中每个单元记录所存储的主存块的块号,该例中相联存储器每个单元应为14位,共8个单元。
|
|
|
|
在地址变换时,利用主存地址高位表示的主存块号与Cache中相联存储器所有单元中记录的主存块号进行比较,若相同即为命中。这时相联存储器单元的编号就对应要访问Cache的块号,从而在相应的Cache块中根据块内地址(上例中块内地址是12位,Cache与主存的块内地址是相同的)访问到相应的存储单元。
|
|
|
|
全相联映像的主要优点是主存的块调入Cache的位置不受限制,十分灵活。其主要缺点是无法从主存块号中直接获得Cache的块号,变换比较复杂,速度比较慢。
|
|
|
|
(3)组相联映像。这种方式是前面两种方式的折中。具体方法是将Cache中的块再分成组。例如,假定Cache有16块,再将每两块分为1组,则Cache就分为8组。主存同样分区,每区16块,再将每两块分为1组,则每区就分为8组。
|
|
|
|
组相联映像就是规定组采用直接映像方式而块采用全相联映像方式。也就是说,主存任何区的0组只能存到Cache的0组中,1组只能存到Cache的1组中,以此类推。组内的块则采用全相联映像方式,即一组内的块可以任意存放。也就是说,主存一组中的任一块可以存入Cache相应组的任一块中。
|
|
|
|
在这种方式下,通过直接映像方式来决定组号,在一组内再用全相联映像方式来决定Cache中的块号。由主存地址高位决定的主存区号与Cache中区号比较可决定是否命中。主存后面的地址即为组号。
|
|
|
|
|
|
替换算法的目标就是使Cache获得尽可能高的命中率。常用算法有如下几种。
|
|
|
|
(1)随机替换算法。就是用随机数发生器产生一个要替换的块号,将该块替换出去。
|
|
|
|
(2)先进先出算法。就是将最先进入Cache的信息块替换出去。
|
|
|
|
(3)近期最少使用算法。这种方法是将近期最少使用的Cache中的信息块替换出去。
|
|
|
|
(4)优化替换算法。这种方法必须先执行一次程序,统计Cache的替换情况。有了这样的先验信息,在第二次执行该程序时便可以用最有效的方式来替换。
|
|
|
|
|
|
Cache的性能是计算机系统性能的重要方面。命中率是Cache的一个重要指标,但不是最主要的指标。Cache设计的目标是在成本允许的条件下达到较高的命中率,使存储系统具有最短的平均访问时间。设Hc为Cache的命中率,tc为Cache的存取时间,tm为主存的访问时间,则Cache存储器的等效加权平均访问时间ta为:
|
|
|
|
ta=Hctc+(1-Hc)tm=tc+(1-Hc)(tm-tc)
|
|
|
|
这里假设Cache访问和主存访问是同时启动的,其中,tc为Cache命中时的访问时间,(tm-tc)为失效访问时间。如果在Cache不命中时才启动主存,则
|
|
|
|
|
|
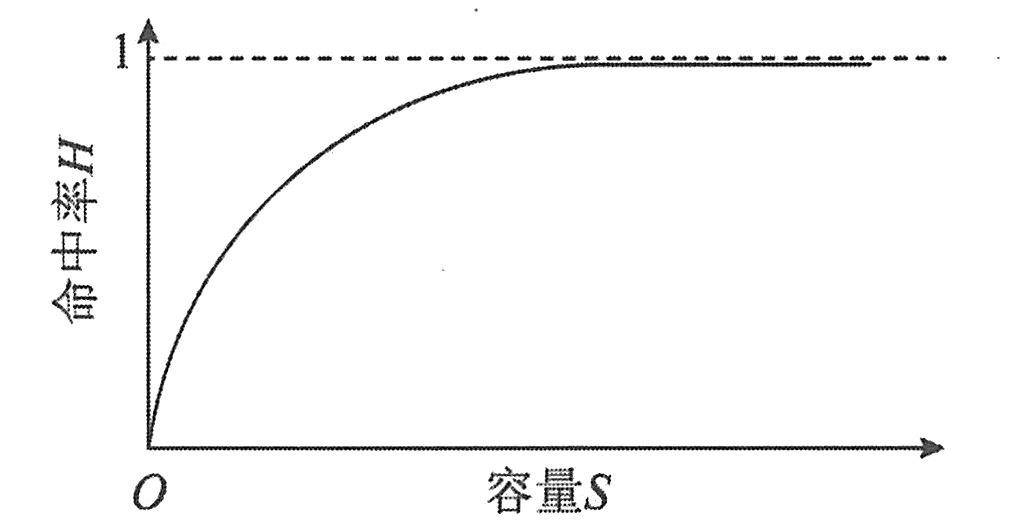
Cache的命中率与Cache容量的关系如下图所示。Cache容量越大,则命中率越高,随着Cache容量的增加,其失效率接近0%(命中率逐渐接近100%)。但是,增加Cache容量意味着增加Cache的成本和增加Cache的命中时间。
|
|
|
|
|
|
|
|
在指令流水线中,Cache访问作为流水线中的一个操作阶段,Cache失效将影响指令的流水。因此,降低Cache的失效率是提高Cache性能的一项重要措施。当Cache容量比较小时,容量因素在Cache失效中占有比较大的比例。降低Cache失效率的方法主要有选择恰当的块容量、提高Cache的容量和提高Cache的相联度等。
|
|
|